

2016-10-12 Currently,the Unmanned Warrior exercise is being hosted by the Royal Navy and conducted in Wales and Scotland with coalition partners.
The exercise is focused upon robotic vehicles and their potential contributions in the battlespace.
According to the Royal Navy, Unmanned Warrior is a multinational event involving 40 research and development companies as well as the US Navy and the NATO Centre for Maritime Research and Experimentation (CMRE). Part of the second stage of the Joint Warrior naval exercises, it includes Unmanned Aerial Vehicles (UAV), Unmanned Underwater Vehicles (UUV), and Unmanned Surface Vehicles (USV).

These vehicles and their sensors and software will be subjected to a number of challenges based on themes from a 2015 workshop. These will consist of Anti Submarine Warfare (ASW); Information, Surveillance, Target Acquisition, and Reconnaissance (ISTAR); Command and Control; Hydrographic and Geointelligence; and Mine Countermeasures (MCM).
“We have deliberately adopted a different approach to capability demonstration, in that the MOD is inviting participants to offer their thoughts on what future capability might look like and where technology can be exploited without any preconceptions,” says Fleet Robotics Officer Commander Pipkin.
The Royal Navy identifies the goal of the current exercise as follows: “to explore the feasibility of increasing the use of unmanned and autonomous systems in delivering maritime capability.”
Various systems are being tested and evaluated with regard to their potential contributions.
In part, the services are sorting out templates to provide to industry to help the UK and allied forces obtain equipment which can actually contribute to enhanced maritime security.
As Commander Peter Pipkin, Fleet Robotics Officer, put it: “What we are seeking to achieve is an event that re-shapes the market to provide new opportunities for everbody and capability transformation for the Navy.”
One news item focused on activity being conducted with regard to counter mine activity.
The Qinetiq base here is BUTEC, the British Underwater Test and Evaluation Centre, set in a more intimate corner of the Scottish seascape than the wide open vistas of Benbecula.
Here there is a small complex of jetties and adjacent boat sheds with a supporting operations room and administration hub for the almost continuous series of underwater trials conducted here on behalf of the MoD.
For Unmanned Warrior this is the locale for two, arguably three – if you include Command and Control, of the five themes of investigation that the teams are demonstrating: Mine Hunting and Hydrographic surveys.
A lot of this is due to the commonality of the systems used, such as the Remus 100 and Remus 600 which scour the sea bed with their refined sonar beams and reproduce what is down there.
If you are looking for mines then the mines will show up on the scan, if you are trying to draw a chart then the sonar will give you the outline of contours and underwater obstacles ready to be digitised for the navigator.
There was a flurry of activity on the dockside as the teams in bright red immersion suits and high visibility life-jackets fussed around their support craft and rigid inflatable boats, fetching and carrying long torpedo shaped objects from the preparation rooms down onto the pontoons to ready their underwater robots for action.
And a mixture of accents told of US and Canadian teams bringing their systems into play too.
The majority of these are truly autonomous in that they are pre-programmed with a subsurface mission, launched and then left to get on with it.
They will track up and down recording seabed features and return to the surface when finished, operating perhaps for up to 8 hours at a stretch if needed An additional layer of autonomy is added if the the pick up craft is also unmanned, as some of them are.
Buzzing overhead was the Blue Bear BLACKSTART fixed wing UAV acting as a communications link to mission control in the Command and Control cabin, the sea areas being inspected being some way away.
This was in one of the three MAPLE integration centres, actually an ISO container full of computers, screens and anxious people, where the robots are told what to do.
Later came a cheer. A record!
The BAe Systems and SeeByte mission commanders had brought nine autonomous systems on line, responding to each other, flying, swimming and diving together, but hard at different tasks, looking for different things.
A choreographed ballet under the baton of the maestro.
The US Navy’s Office Science and Technology is participating fully in the exercise.
According to ONR, new knowledge will be generated in five key mission areas:
One example of a vehicle being put through its paces is the Maritime Counter Measures C2 platform.
“The MCM C2 combines air, surface and sub-surface unmanned assets for the first time to speed the operational pace and reduce the detect-to-engage timeline in naval mine warfare. It also enables military personnel to operate further away from high risk areas.
The system comprises an Unmanned Surface Vehicle (USV) deploying and operating a tethered rotary wing Unmanned Air Vehicle (UAV) that carries a radio and other sensors.
HOW IT WORKS:
The USV is deployed with the Unmanned Underwater Vehicles (UUVs) from the Command Ship outside the mine threat area. When UUVs surface at intervals during the mission the UAV is able to communicate with the UUV to exchange data packets via the Radio link. These data packets are relayed back to the command ship to enable processing of the data before the UUV mission is complete.
WHY IT IS IMPORTANT:
Current operations are restricted by the time taken to collect and then process data captured by the UUV. This delays follow-on missions to relocate and take action on any mine like contacts identified. Further, a manned vessel currently has to enter the threat area and remain in the vicinity to launch and recoverthe UUVs and communicate with them.”
http://www.onr.navy.mil/Media-Center/~/media/Files/Fact-Sheets/UW16/UW16-US-Tech-MCM-C2.ashx

Another system being tested is the Airborne Computer Vision or ACV computer onboard an RPA.
“The ACV computer provides autonomous, persistent, and rapid analysis of maritime and land-based imagery. ACV computers can be hosted as payloads on multiple manned and UxS platforms, and with multiple models and types of imaging cameras. An open-architecture framework allows for the rapid integration of new sensors to the ACV computer, which in turn disseminates the critical information to fleet commanders.
In addition to vessels, the ACV computer can detect, classify, identify, and geo-locate buildings, bridges, vehicles, and people. A fully digital process eliminates common human errors and provides opportunities for fleet commanders to increase the speed of warfare.
The ACV technologies are being tested to support multiple missions of interest to the United States. These missions span from Combat Support Agency maritime chart production to squad-level littoral Reconnaissance Surveillance Target Acquisition (RS TA) operations. Multiple US partners have funded the development of the ACV technologies which are managed under the Office of Naval Research.
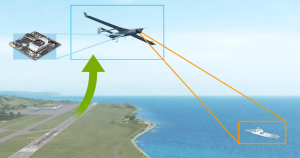
WHAT IT IS:
The Airborne Computer Vision (ACV) computer can be hosted onboard multiple Unmanned Systems (UxSs). The ACV computer is capable of “mimicking” aspects of human-level analysis of imagery collected by UxSs. The ACV computer will autonomously detect, classify, identify and geo- locate maritime vessels at sea and in port. The Fleet is notified of any vessels of interest.
HOW IT WORKS:
Hosted on UxSs, the ACV computer autonomously searches images for vessels and classifies them by their size, 3-D shape, and colors. Next, pattern matching is used to compare detected vessels against a library for positive identification. In parallel, measurements are collected to accurately determine the position of the vessel. If a vessel meets pre-defined criteria, the Fleet is provided with an alert.
WHY IT IS IMPORTANT:
ACV provides commanders at sea a means to autonomously identify vessels of interest , improving their decision capability. The ACV computer reduces the time to process/act on critical information.”
Other fact sheets from the US Navy with regard to the exercise can be found here:
http://www.onr.navy.mil/Media-Center/unmanned-warrior.aspx