


By Robbin Laird
The pathway for the U.S. Navy to integrate unmanned surface vessels into its fleet operations is for these vehicles to be able to effectively and efficiently support real-world tasks that fit into maritime concepts of operations, rather than being disruptive technology to mission operations and undercutting combat capability.
A key path to do so is for industry to work with the maritime forces in order to demonstrate their performance, and in the process also evolve their platforms and tailor them to more effectively deliver desired combat capability.
In my first interview with Jack Rowley, the Chief Technology Officer and Senior Naval Architect and Ocean Engineer with Maritime Tactical Systems (MARTAC), we discussed how the U.S. Navy was addressing the challenge of operating maritime autonomous systems.
We discussed the key importance of getting USVs into the workflow in order to shape a way ahead for maritime remotes to operate within a combat force.
Maritime unmanned systems are simply that until they fit into the mission and warfare workflow and become a key part of the evolving concepts of operations of the fleet.
In Rowley’s view, the U.S. Navy has the opportunity to do so now.
According to Rowley: “The Navy has, in the past year, shown excellent initiative on the need for both USVs and UUVs within the Maritime Environment.
“To the point that they have set up a UUVRON-1 in Keyport, WA and the SURFDEVRON-1 in San Diego to start using them with fleet assets, not only in scheduled exercises, but to also begin looking at using them to visualize what they can do as a key player with manned fleet units.”
In other words, the U.S. Navy is moving closer to the opportunity to incorporate unmanned maritime surface vessels as part of its modular task force approach to operating the force as a kill web.
And these USVs can be fitted to do a variety of mission tasks going forward.
In this interview, we focused on the interaction between exercises with the users and how MARTAC is shaping the kind of capability which industry can then offer to the end user.
Or put in other words, exercises drive development; development provides new capabilities which then can be inserted into a new exercise regime, taking the U.S. Navy closer to being able to acquire the kind of operational capability which will fit into the fighting force, rather than disrupting it.
As Rowley described the process, the various exercises MARTAC has engaged in since he came to the company in 2015, have led to the shaping of a scalable fleet of ships ranging in size from a six foot to a fifty-foot USV, which allows the operation of a variety of payloads, with high performance speed and extended range of operation for the fleet of maritime autonomous systems.
In Rowley’s view, the exercises they have involved in have been part of the process whereby the U.S. Navy is looking more seriously at what, and how, USVs can contribute to the fleet.
ISR-Focused Exercises
The first exercise we discussed was the S2ME2 ANTX Exercise held by the USMC at Camp Pendleton in California in September 2016.
At this exercise, there was a focus on the potential operational impact of using USVs for an amphibious ship-to-shore mission. MARTAC brought an eight-foot version of its MANTAS USV to perform two missions: (1) Sail into the Del Mar Boat Basin and from that location relay video to the amphibious force command center and (2) just outside of the immediate surf zone, the T8 scanned and provided ISR data on an obstacle location, beach gradient, water conditions and a visual of the shoreline. In other words, the T-8 performed an ISR mission to support the assault force.
Effectively, the function of the 8-footer was to go in and survey the beach prior to an assault.
As Rowley highlighted: “It was strictly a nightime ISR mission. The T8 sailed in autonomously, looked around, got some video and then brought it back out again without being detected.”
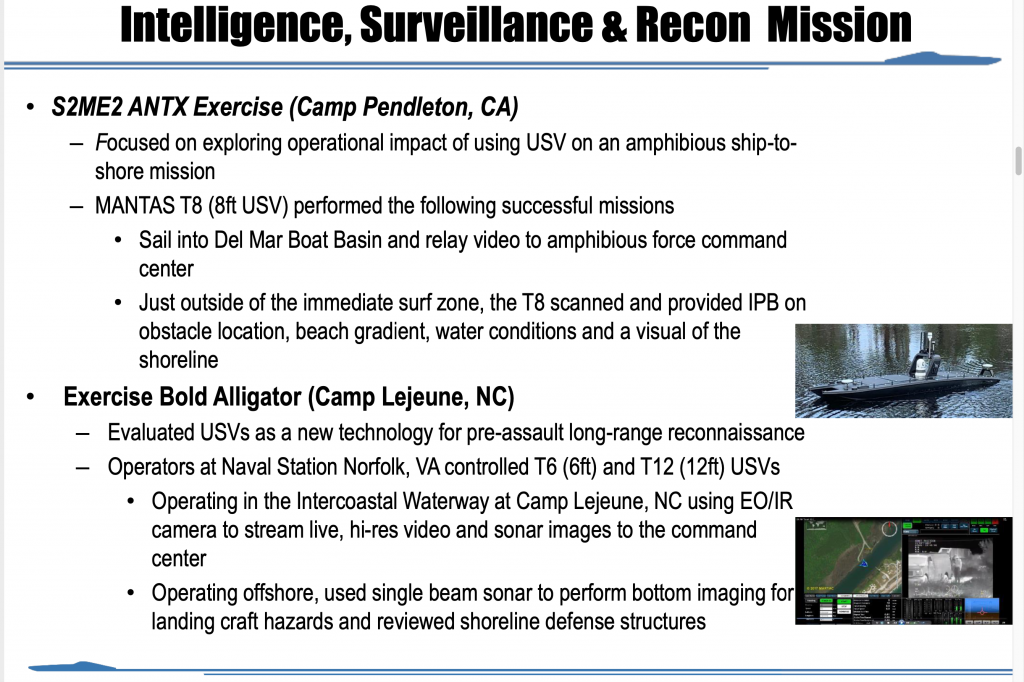
The next exercise we discussed was one with which I have gone to in the past, namely, Bold Alligator.
This BA exercise was BA-17 held in October 2017. They operated from Camp Lejeune and the task was again an ISR tasking. Rowley highlighted the USV mission in this exercise as follows: “Camp Lejeune was to be basically a long range USV environment with a reconnaissance mission to go up the inter-coastal waterway and be able to scan both sides of the waterway looking for anything that’s out of the ordinary. Also, there was an additional ISR task to look at the bottom of the waterway with a small sonar for detection of any anomalies.”
The operators at Naval Station, Norfolk, Va., controlled a T6 (6-foot MANTAS) and a T12 (12-foot MANTAS) USV. They operated the vehicles in the inter-coastal waterway at Camp Lejeune, North Carolina, using and EO/IR camera to stream live, hi-res video and sonar images to the command center. In addition, the craft also operating offshore and used a single beam sonar to perform bottom imaging to determine landing craft hazards and examination of shoreline defense structures.
Both of these exercises supported ISR missions for an amphibious assault force.
The focus was upon expanding the scope of ISR that could be available to the command element either prior to the assault or following the assault. They used 6-foot, 8-foot and 12-foot variants of the modular MANTAS configuration.
Scalability was being demonstrated as well as payload flexibility in terms of what each of the different sized USVs could be integrated with during the exercise. In other words, what was demonstrated was that a common operating system on these three different sizes of USVs with variant payloads could deliver a desired combat capability.
The Bold Alligator Exercise highlighted the importance of an exercise for evolving capabilities as well.
As Rowley put it: “The exercise underscored the shortfall of the smaller sensors that could be placed onboard the 6-foot variant. The T6 only had a small omnidirectional camera on itresulting in its inability to see the shore very well in its constant motion scenario. Whereas the 12-footer had a SeaFLIR 230 high-resolution gyro-stabilized EO/IR camera
“Another aspect highlighted during the exercise is the key significance of reliability for USVs. Reliability and functional performance are required for any success for USVs because, unlike a Navy ship that’s manned or a small boat that’s manned, if something goes wrong, sailors can be sent to repair it. On the USV, if something goes wrong you better be able to bring it home because you can’t fix it during its operation at sea.”
Rowley underscored the importance of the scalability and modularity aspect of a USV.
“It is important to be able to change out the sensors without having to build a new boat. USVs have generally been built to support a particular mission and both the boat and payload are designed and built as a “single solution” to a mission.
“Our focus is different. We want to deliver mission flexibility into a scalable fleet so that the operational and logistics support capabilities mean that you can carry our USVs on a larger vessel and have a wide variety of modifiable payload options for the use of that USV during the complete operational cycle of the larger naval vessel operating within a variable task force concept of operations.”
Logistical Support Exercises
We next discussed a very different type of exercise, one which highlights a key area where USVs can play a key role in supporting maritime logistics support.
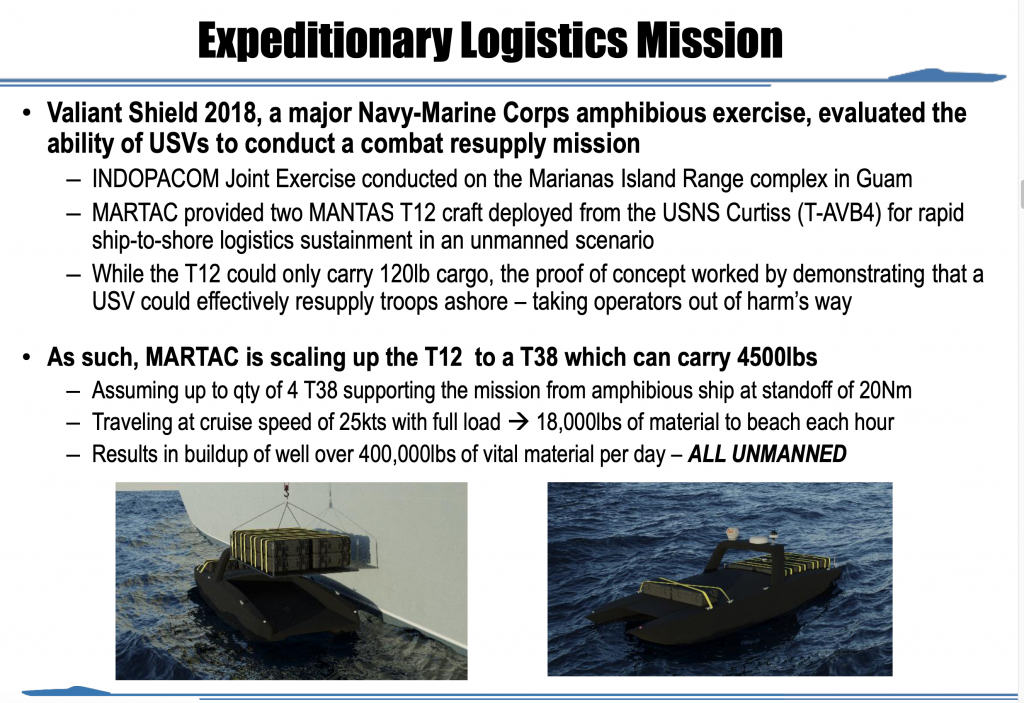
Valiant Shield 2018 was held at Guam. It was a major Navy-Marine Corps exercise, and at that exercise, one focus was upon how USVs could help conduct a combat resupply mission.
The INDOPACOM Joint Exercise was conducted on the Marianas Island Range complex in Guam. MARTAC provided two MANTAS T12 craft deployed from the MSC ship, USNS Curtiss (T-AVB4) to support rapid ship-to-short logistics sustainment via USVs. The T-12 provided proof of concept of the ability to provide resupply via a USV from ship to shore.
The size of the T12 limited the payload to only 120 pounds of cargo, but the proof of concept has paved the way for MARTAC to develop and test a new ”Expeditionary Class” T38 (38ft) USV to perform this combat resupply mission by carrying up to 4500 pounds in a single load. The potential impact of such a capability is significant for this logistics mission.
According to Rowley, the T38 in its anticipated mission profile could, with a four USV craft fleet be able to deliver a buildup of over 400,000 pounds of material in a single day, and to do so by using an all-maritime autonomous force.
This figure is based on two assumptions: a four craft fleet of T38s supporting an amphibious ship stand off at 20 nautical miles. The USV craft would travel at a cruise speed of 25kts to the beach with a full load of 18,000 pounds per sortie. Return speed to the MSC ship, without load would be at 70kts. In this manner, the four-craft USV fleet could deliver 18,000 pounds of material to the beach each hour.
The T38 can fit into a standard 11-meter rib slot on an MSC or Naval ship. For example, there would only need to be minor modifications on the Curtiss to be able to hold six to eight of the T38s, thereby providing this very necessary ship to shore logistics support capability.
The advantages of such a capability are clear.
And Rowley underscored just how significant such a capability could be in terms of work flow as well. “Using either the T38 or T50, one can move material with one or two supervisory controllers on the mother ship. This frees up significant manpower to do other tasks on either the support ships or ashore.”
Another key advantage is that such a logistics support mission using a USV which can fit into a standard 11-meter RIB means it can operate across the fleet to provide a connectivity mission set. In effect, one can use Ships-of-Opportunity to provide the linkage function rather than a specialized support ship.
As Rowley highlighted: “It doesn’t have to be a MSC ship that’s fully opted in for the MSC purpose and that’s controlled by the government. It can be any type of a cargo ship that has cranes. Such a ship can be configured to be able to handle multiple unmanned surface vessels so they can get the equipment in the theater. And then be able to launch it and send material to shore.”
In other words, one can enhance significantly the distributed logistics function to a maritime distributed fleet.
Counter-Mine Exercise
The final exercise we discussed was Trident Warrior 2020 which was held in San Diego and which I briefly attended prior to visiting the Navy Air Boss.
I described that exercise in some detail in an earlier article, but the focus of this effort was to use the T38 which is now part of the new MARTAC “Expeditionary Class – DEVIL RAY” to work with Teledyne Brown engineering to deliver a new payload, namely, a counter-mine payload. What was demonstrated was that the craft is one which is very flexible in terms of payloads which it can carry.
The payload in this case was a high-speed multi-sensor, single-sortie detect-to-engage mine-counter-mine capability. The graphic below, summarizes what was demonstrated in Trident Warrior 2020.
Through these exercises, not only are the maritime services learning what USVs can do, but also, industry is getting closer to having operational capabilities to support the fleet.
With the next major exercise coming up in April in which MARTAC will participate, Rowley estimates that the craft they are bringing will be close to being 90% fully operational.
Through routine exercise, test, and then redesign/rework, the craft continue to learn from each exercise and the Navy gets closer to having operational USVs that support operations rather than disrupting them.
That’s what true disruptive technology is all about – supporting a more lethal and survivable force, rather than making it more vulnerable.
Always remember the lessons from how useful having radar in the force was at Pearl Harbor on December 7 or December 8th (dependent on what side of the time line you were on) 1941.
The featured photo: T12 at sea operating from the MSC ship delivering cargo to the port in Guam during Valiant Shield
For an e-book version of a background paper for this interview, see the following: