

By Robbin Laird
Recently, the Department of the Navy released, on March 16, 2021, its unmanned systems campaign framework. As Admiral Gilday, Chief of Navy Operations, commented in his forward to the document:
As the Navy adapts to an increasingly complex security environment, it is imperative that we understand what our future force will need to operate both in day-to-day competition as well as a high-end fight.
Unmanned Systems (UxS) have and will continue to play a key part in future Distributed Maritime Operations (DMO), and there is a clear need to field affordable, lethal, scalable, and connected capabilities. That is why the Navy is expanding and developing a range of unmanned aerial vehicles (UAV), unmanned undersea vehicles (UUV), and unmanned surface vessels (USV) that will play key roles as we shift our focus toward smaller platforms that operate in a more dispersed manner.
A hybrid fleet will be necessary for the Navy to meet emerging security concerns. We need platforms to deliver lethal and non-lethal effects simultaneously in all domains across multiple axes. UxS will provide added capacity in our Future Fleet — in the air, on the surface, and under the water.
The campaign plan will serve as the comprehensive strategy for realizing a future where unmanned systems serve as an integral part of the Navy’s warfighting team. It will be a living, iterative document that articulates our vision for a more ready, lethal, and capable fleet through acceleration of critical enablers in technology, processes, and partnerships.
We are mindful of past shortcomings, so therefore our approach is deliberate, but with a sense of urgency. We will address every aspect of Doctrine, Organization, Training, materiel, Leadership and Education, Personnel, Facilities, and Policy (DOTmLPF-P), identify and close capability gaps, and work to create and maintain our future naval force, together.
The CNO highlighted a number of key aspects shaping the way ahead. The first is the high-end fight which is built around shaping an integrated distributed force. His focus on a hybrid fleet in my mind rests on shaping how distributed fleet elements can effectively use maritime autonomous systems, not just simply introducing them. He made it very clear that the UxS’s must add capacity and capability for the Fleet, or put another way, if they don’t, then the Navy will not use them.
He underscored that the goal is to make unmanned systems “serve as an integral part of the Navy’s warfighting team.” If they are not, then they will not be used.
It is not about technological prowess alone; it is about how these systems can enhance the lethality, survivability and capabilities of a distributed integrated air-maritime force.
And one must also remember that the US Navy is going through a strategic shift from the standard carrier task force organizational concepts to sorting through how to fight as an integrated distributed fleet. As maritime remotes enter the fleet, they will be doing so in the context of this broader strategic shift.
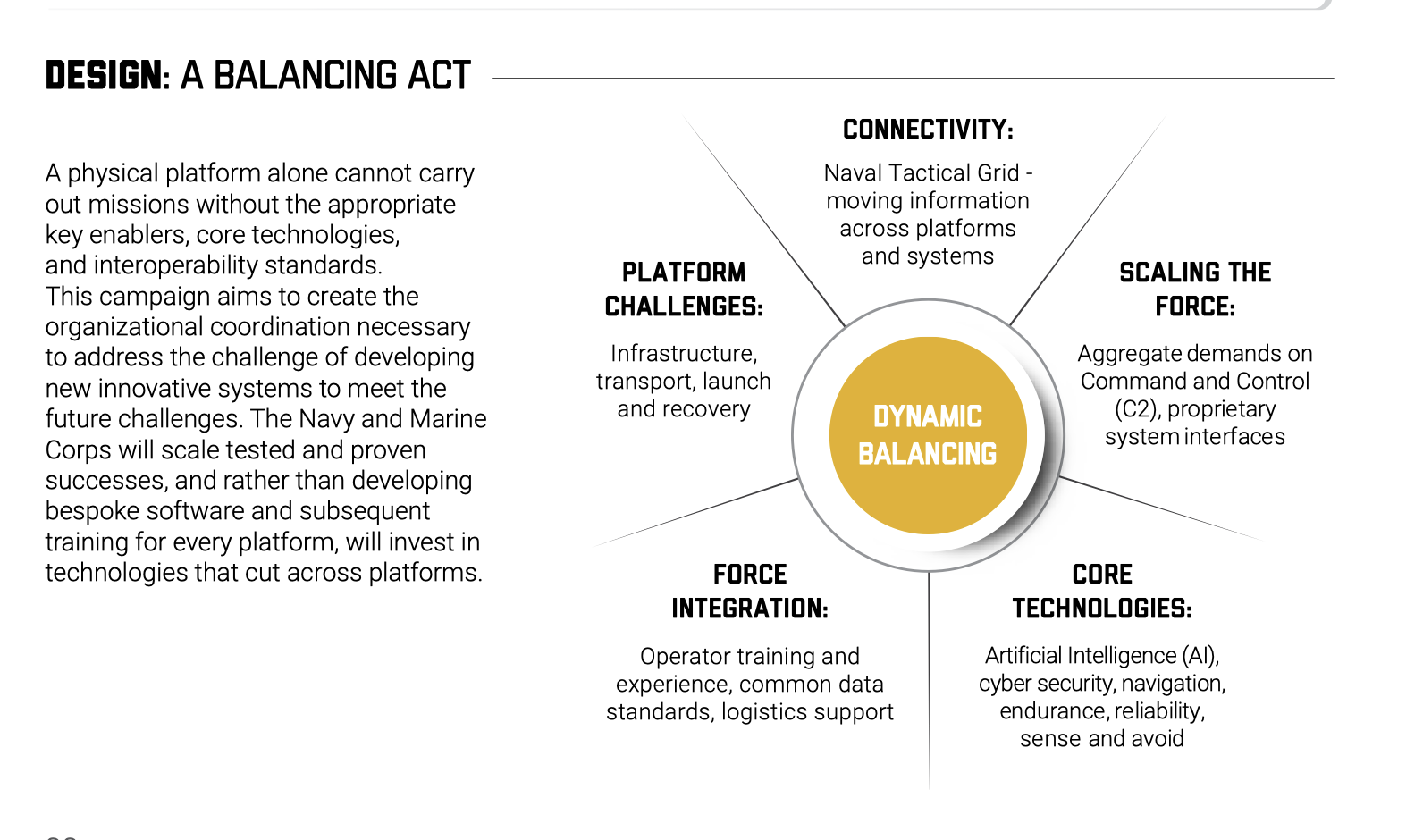
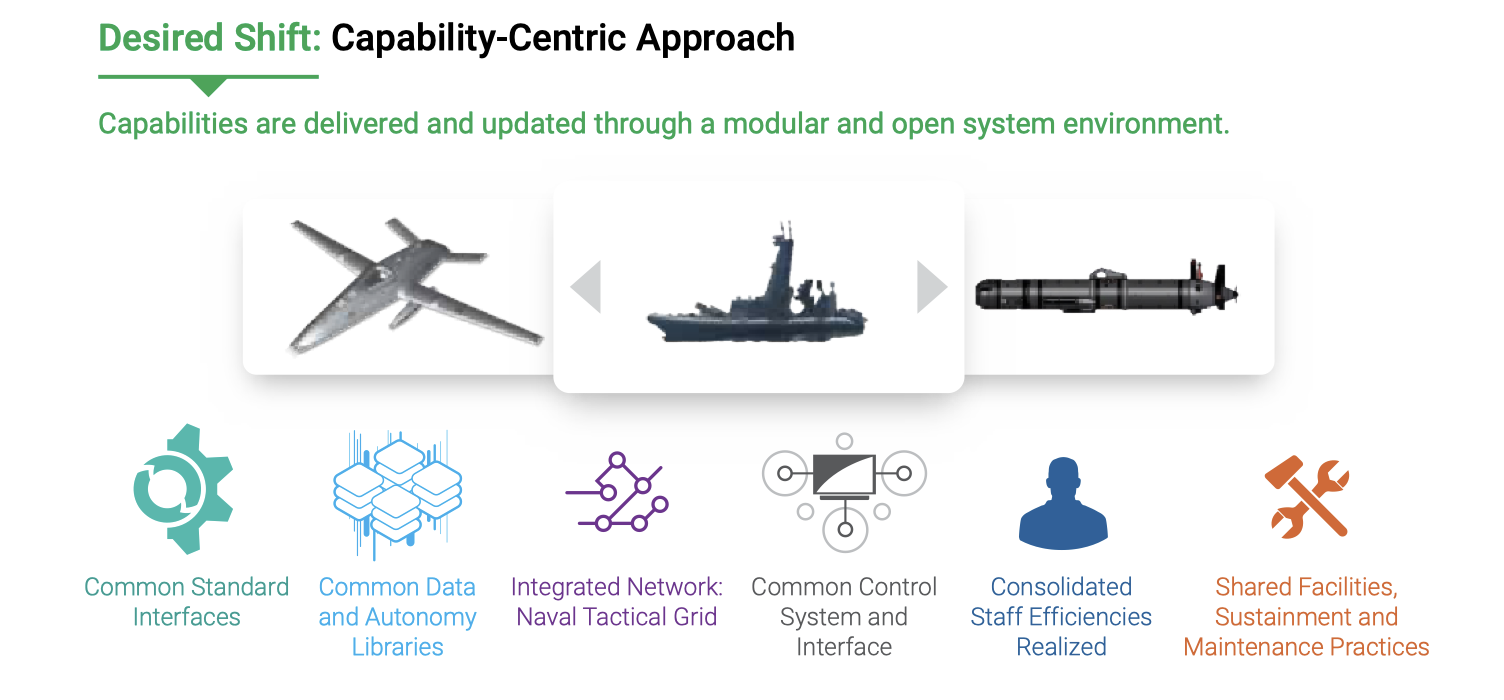
There are two graphics in the document which highlights clearly what is required to have an effective way ahead with regards to the incorporation of maritime autonomous systems into the fleet.
The first can be seen above as the featured graphic; the second can be seen below.
I had a chance recently to discuss this report, and these graphics with a leading engineer involved in maritime autonomous systems, Jack Rowley, now of MARTAC. Rowley has developed a concept of operations for a scalable hybrid fleet operating together to deliver the kind of capability which the report highlights. This provided me a chance to not only discuss the way ahead as sketched in the report, but to also consider a concrete case study of how it can be effectively executed.
Jack Rowley: “The report focuses on where the Navy needs to go from a standpoint of a manned-unmanned criteria. Because unmanned can never, by itself, be totally “unmanned”, to date the capabilities of “unmanned” have been primarily used to augment and improve the “manned” capability.
“The challenge within the framework is to demonstrate that USVs are key enablers when working together with the fleet. They need to be robust and reliable. They need to be modular and interoperable so they can work together something like a wolfpack, but with the ability to quickly change the mission sensors and payloads. The approach until now has been very platform-centric with proprietary software, thereby blocking the kind of interoperability which makes autonomous systems a useful integratable asset into the fleet or the combat group of which the USV is to be a part of.
“A capability-centric approach requires very good interoperability. That’s where the Navy’s Common Command System, CCS, comes in, which by the way is also very much in tune with the Maritime Autonomous Platform Exploitation , MAPLE, system being developed by the Royal Navy. The final result desired by both the U.S. and the U.K. is to have these two systems work together to deliver effective coalition joint capabilities.
“Experimentation leading to adoption in the fleet is the key way to get the process underway for operational capabilities within the fleet. The U.S. Navy has set up both a UUVRON-1, for unmanned undersea vehicles in Keyport, WA and SURFDEVRON-1 in San Diego, CA for unmanned surface vehicles. Both of these will be great assets for developing and testing that “Manned-Unmanned” hybrid fleet concept.
We then discussed the “nested-dolls approach” which Rowley introduced earlier this year at the Virtual Technology Systems and Ships Symposium hosted by the American Society of Naval Engineers (ASNE) from January 26-28, 2021.
Obviously, what Rowley has in mind, draws upon the “Russian Dolls” concept whereby a smaller doll is inside a larger doll. In this manner smaller USVs, UUVs and UAVs, could be embedded on, and work with, larger USVs as integrated, composite, and modular UxV-UxV units.. As desired by their supervisory controllers, up against a real-world threat scenario, the controllers could offload the smaller USVs, UUVs or UAVs, with diverse payloads, in an integrated execution of multiple UxV scenarios on a single mission.
The way he described it that the larger LUSV which is being designed to be a size and speed which can keep up with destroyers and task groups. For example, one might operate three of these LUSVs with an expeditionary strike group. They are approaching an island that is 500 miles away and determine that they need a discrete ISR scan into the area where the task force will operate. There is concern as well that mines might be in the upcoming operational area as well.
A force package of smaller USVs could be placed onto the larger LUSVs assigned to the task force. Several of these smaller USVs, which could range in size as long as 50 feet, could be configured to go into the objective area to perform the ISR and a second group of USVs could be configured to engage in a scan searching for mine-like objects..
As Rowley put it: “The technology exists today to do this. One could use 24-to-50-foot USVs being carried by the LUSV. And these assets are capable of significant speed to the objective ISR and mine-sweeping areas. For example, our 38 (T38) and 50 (T50) foot catamaran USVs are capable of speeds in excess of 80 knots fully loaded.
“This USV fleet of remotely piloted and autonomous craft would be controller by supervisor controllers in one of the command ships within the expeditionary strike group. LUSVs could be dispatched from the strike group to proceed toward the ISR area at 25kts. At a predesignated point, the ISR and MCMT38s could be launched from their respective larger LUSVs and proceed at 80 knots towards individual ISR starting waypoints near the beach at which time the T38 ISR craft would start their ISR scan and the T38 MCM craft would begin their mind detection scans at their waypoint locations. The LUSVs would loiter at their location and act as a communications gateway until the T38s return.
“The USV craft would perform their ISR missions and mine-detection missions with their respective payload configurations. They would transit and operate independently to reduce and limit radar detection. By operating as an independent wolfpack and not as clustered group, their ability to conduct their mission with relatively low visibility is enhanced.
“As the ISR camera displays are returned in real time, the payload controllers can determine what they are seeing. Based on an analysis of the ISR situation, they can make determinations with regard to any inland or bay areas that may require a closer look. At this time, they can then launch anywhere from one to three 12 foot (T12) USVs off of the T38 USV to take that closer look. The information is then relayed from the T12 camera, back to the T-38, to the LUSV and then back to the ship for real time analysis by ISR analysts.
“The T12 returns to the T-38 for recovery. Similarly, a second supervisory controller monitoring one of the other T38 ISR USVs could launch two gyrocopters to further investigate an inland anomaly that he is observing. The Gyrocopters return to the T-38 and are recovered onboard. During the same timeframe of the ISR scans, the two T-38s with payloads configured for mine detection both enter the bay and independently conduct their bottom scan, sending all bathymetry data back to an analyst onboard the control ship at the strike group. Effectively, all T38s are operating independably of one another, under the watch of a minimal number of supervisory and payload controllers.
“In the MCM mine-detection scenario, the two MCM payload enabled T-38s being operated by their supervisory controllers can share the situation with an EOD analyst seated next to him.“
“Based on the scans of the area, the ISR and MCM T-38s provide a close-up picture and convey that to the command ship in real time. One of the key considerations is that they can operate from any of the ships on the task force as long as the ship has qualified supervisory controllers.“
”Upon completion of their respective ISR and MCM mission, the T38s will return at high speed to intercept the LUSVs at their loiter point. Each of the T38s will be autonomously recovered onto their respective LUSV and then proceed back to the strike group formation. The commander was able to get the information he needed within 24 hours, as he had requested. And to again underscore, that all of this technology exists today.”
The Navy Unmanned Campaign Plan can be read below:
20210315 Unmanned Campaign_Final_LowResJack Rowley’s paper on his nested dolls concept of operations for USVs can be read below: