


By Robbin Laird
On May 16, 2022, the Royal Australian Navy led a two-week exercise called Autonomous Warrior 2022. According to an ADF press release, the exercise was built around “a simulated, next generation naval battlespace – Exercise Autonomous Warrior 2022 (AW22). This Royal Australian Navy (RAN) led Exercise will test and evaluate uncrewed, robotic and autonomous systems in Jervis Bay, in the nearby East Australian Exercise Area and the skies above.”
Prior to focusing on the reporting about AW22, I would like to look back at events leading up to the current exercise as the Royal Australian Navy has embraced autonomous systems and how the RAN is shaping its way ahead with regard to such systems and capabilities.
The Perspective of Cmdr. Paul Hornsby
My first encounter with the RAN and its approach to autonomous systems was when I attended the Royal Australian Navy’s Seapower conference held in Sydney from October 8th through the 10th, 2019.
There I attended a session led by Cmdr. Paul Hornsby, then the Royal Australian Navy lead on autonomous warfare systems.
His presentation provided an overview on how the Australian Navy is addressing the development and evolution of remote systems within the fleet. As Hornsby put it in his presentation: “We have no choice but to be leaders in this area.”
He underscored that the significant operational area which Australian forces need to patrol coupled with limited numbers of maritime platforms and manpower limits meant that the building, operating and integration of maritime remote systems in the fleet was an operational necessity for the Royal Australian Navy. “We could not get enough help from remote systems and artificial intelligence.”
He argued that there was a cross-societal engagement with remote systems in Australia which the Navy could leverage as well. He noted that Australia has been involved in allied exercises across the board in the remote systems area. He laid out through the various exercises in the UK, Australia and elsewhere that his team has been fully engaged in cross learning with allies, and to do so in order to harvest the best and leave the rest. He made a case for why Australia is a very important area for allies to work with the Aussies on remote innovations. The conditions in Australia are challenging and paraphrasing Frank Sinatra: “If you can make it here, you can make it anywhere.”
In his presentation, Cmdr. Hornsby underscored a number of key contributions of AI to the build out of a remote system distributed force. The following graphic highlights the key aspects which he highlighted.
Key points are reaching a stage where the remotes can work with one another, underwater and above water, to provide SA to the battle commander; and to shape ways for the distributed system to assist and make decisions in something which really as way beyond the classic OODA loop.
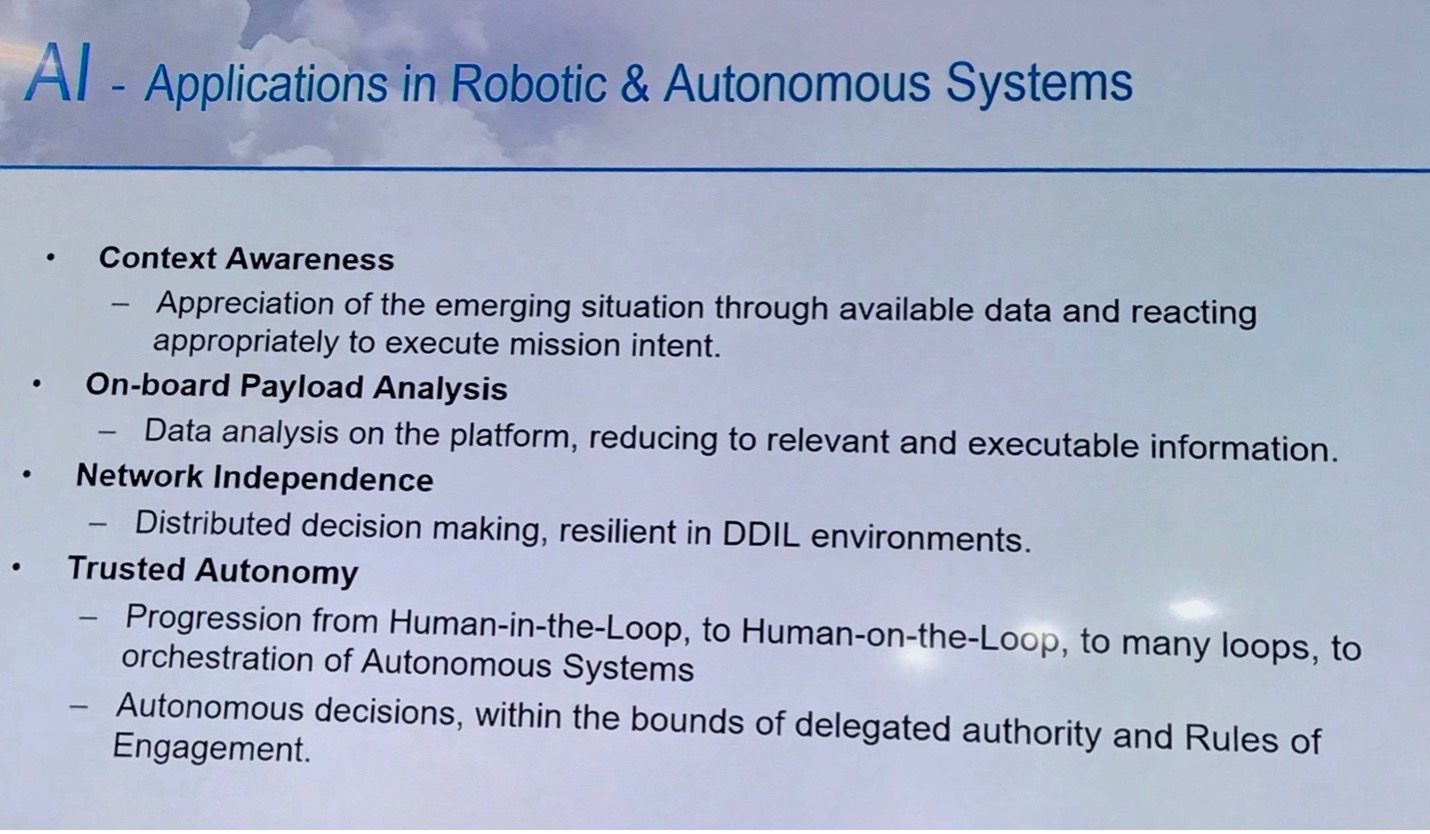
When the machines are working OO and notably with AI then the focus is upon how to DA.
And even more to the point, humans and machines need to work the decision-making loop together and this requires significant learning on the human side for sure.
As he concluded his presentation, he framed a number of key questions which he argued needed to be addressed and ways ahead found to answer them. It is often the case, that change is really about changing the nature of the questions which need to be answered, rather than finding new answers to older questions. The following graphic lays out the core questions which he posed:

I followed up later with Hornsby to continue the discussion about the way ahead for the RAN in the autonomous systems area. The broad point is that Australia is focusing on robotics and artificial intelligence more generally in its economy, with clear opportunities for innovation to flow between the civil and military sectors. Australia is a large island continent with a relatively small population. For both economic and defense reasons, Australia needs to extend the capabilities of its skilled manpower with robotic and AI capabilities. For the Navy, this means shaping a much large “fleet” in terms of a significant web of maritime remotes working interactively with the various manned assets operating in an area of interest.
Commander Hornsby highlighted the 2018 Australian Robotics Roadmap as an indicator of the Australian approach to cross-leveraging robotic systems and AI. As the report noted: “Robotics can be the force multiplier needed to augment Australia’s highly valued human workforce and to enable persistent, wide-area operations in air, land, sea, subsurface, space and cyber domains.”
In our discussion, Commander Hornsby noted that collaborative R and D and shared experiences with allies was a key element of the Australian approach, but that Australia had unique operating conditions in the waters off of Australia, and systems that might work in other waters would not necessarily be successful in the much more challenging waters to be found in Northern and Western Australia, areas where the deployment of maritime remotes is a priority.
But one must remember that the maritime remote effort is a question of payloads and platforms. Not simply building platforms. His approach to maritime remotes is very much in the character of looking at different platforms, in terms of speed, range, endurance, and other performance parameters, measured up against the kind of payload these various platforms might be able to carry.
Calculations of the payload/platform pairing and their potential impacts then need to be measured up against the kind of mission which they are capable of performing. And in this sense, the matching of the payload/platform dyad to the mission or task, suggests prioritization for the Navy and the ADF in terms of putting in to operation the particular capability.
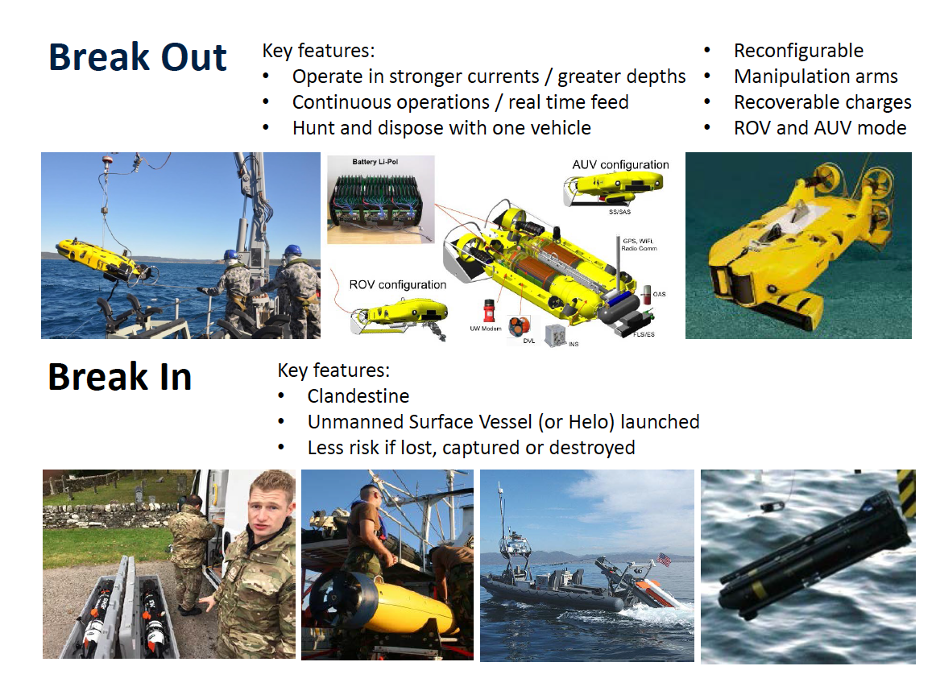
Commander Hornsby breaks out the missions for AUV and UUV employment in the following manner:
Home & Away operations…
- Break Out (Around own critical / sensitive infrastructure – High end UUVs) •Break In (Deployed / Amphib – Low end AUVs / single shot / disposable)
- Block Out (Autonomous Maritime Asset Protection / Robot UUVs / CIED)
- Block In (High end AUVs – Sub Launch / XLUUVs / Mining / Intervention)
- Surveillance (Persistent AUVs for surveillance / attribution – wave gliders
- Servicing (Large UUVs for industrial off-shore tasks – in water docking)
Pending combination, provides: Deterrence, Sea Control, Sea Denial, Power Projection or Force Protection
What this means is that different payload/platform combinations can work different missions more or less effectively. And quite obviously, in working the concepts of operations for each mission or task which will include maritime remotes needs to shape an approach where their capabilities are properly included in that approach.
And in a 2016 briefing by Hornsby, he highlighted this point as follows:
But importantly, maritime remotes should not be looked at in isolation of the operation of the distributed force and how integratable data can be accumulated and communicated to allow for C2 which can shape effective concepts of operations.
This means that how maritime remotes are worked as an interactive grid is a key part of shaping an effective way ahead. And this allows for creative mix and matching of remotes with manned assets and the shaping of decision making at the tactical edge. Remotes and AI capabilities are not ends in of themselves; but are key parts of the reshaping of the C2/ISR capabilities which are reshaping the concepts of operations of the combat force.
In that 2016 briefing, Commander Hornsby provided an example of the kind of grid which maritime remotes enable:
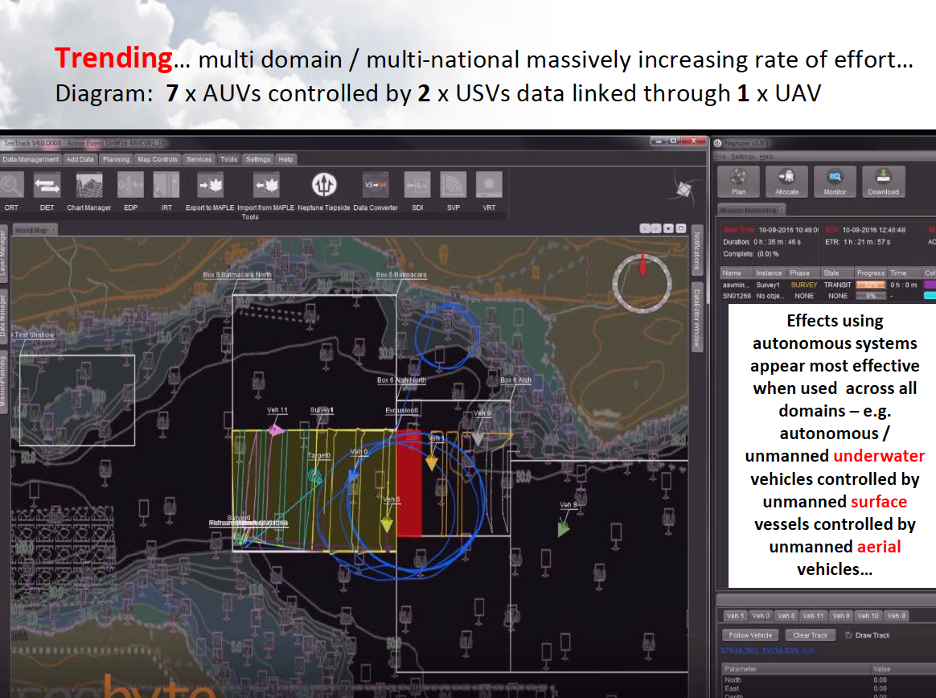
Such an approach is clearly crucial for Australia as it pushes out its defense perimeter but needs to enhance maritime security and defense of its ports and adjacent waters. And that defense will highlight a growing role for maritime remotes.
Next Generation Autonomous Systems
My next dealings in Australia with the Royal Australian Navy and autonomous systems was in 2021 when I wrote the Williams Foundation Report on Next Generation Autonomous Systems. I have had two gap years enforced by COVID-19 from my last visit to Australia in March 2020 where I focused on the new build Australian patrol boat until my forthcoming trip in September 2022. And will certainly follow up with regard to the next generation autonomous systems issues when back this Fall.
At the April 8, 2021, seminar (one which was originally scheduled during my March 2020 visit), the Chief of Navy, Vice Admiral Noonan, focused on the RAN perspective on the way ahead with regard to autonomous systems. At the seminar, he discussed the Navy’s RAS-AI 2040 strategy which he had introduced last year.
As he described that strategy: “The way that we’ve sought to visualize this vision is through five very fundamental effects. Force protection, obviously all about keeping our people safe and out of harm’s way so that they can get on and do their job. Force projection is about how we can achieve mass. Force potential using human machine teaming, ultimately to achieve better and more effective decision-making in the war fighting effort. Partnered force concept around how we will operate as an integrated and joint force by design.”
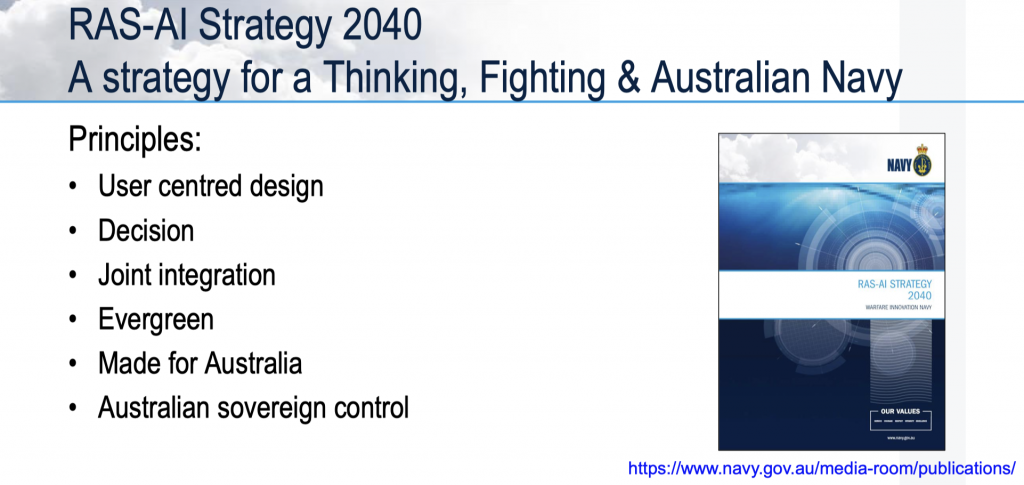
“The six fundamental principles were built around a user centered design. The system design is user centered. In terms of decision support, we are looking to have systems that significantly reduce the cognitive load on our commanders and operators alike, allowing for them to achieve greater shared situational awareness to deliver effective, efficient, and ethical decision-making.
“The joint integration piece is critical. I cannot stress that highly enough in terms of we must ensure that these systems are integrated. Not just integrated into the platforms or their parent platforms but integrated into the force.
“And they are capable of being evergreen. This is the new term for spiral development. It’s about ensuring that we have systems that remain contemporary, and I am challenged on a daily basis about capability gaps and about deficiencies in the long lead times that require us in the shipbuilding space. It takes about 10 years to build a submarine, or five years to build a frigate.
“And are we incorporating old technologies? Bottom answer is no, in that we are designing future and evergreen in growth into our platforms. And I think that’s a very important concept that we have not always fully grasped.
“Finally, is the importance of made in Australia. Our systems must be designed for the very unique circumstances that we operate in, particularly in the maritime environment.”
Vice Admiral Noonan then highlighted really the key aspect of using any new sensor networks, whether they be autonomous or not, namely, their integration into a C2 system. “Operating all these systems would simply be too complex, too time consuming and ultimately unmanageable without a common control framework. Therefore, as part of the way that we seek to get after that, the building blocks of that framework, as we see them in Navy, it needs to be a legal and ethical module that allows us to have embedded and encoded regulatory and legal protocols. Clearly a common control protocol that unifies the means of machine control.
“We need common control bridges that provide an interface between the proprietary control systems and the combat management systems of the platforms from which they’re housed. We need a common control language that can express C2 in a way that both human operators and RAS-AI machines can understand. And ultimately, we need a common spectrum management protocol, levering and integrating programmed projects to harden and ensure the spectrum in which we operate.”
The Perspective of Vice Admiral (Retired) Barrett
And after the seminar, I had a chance to discuss with Vice Admiral (Retired) Tim Barrett more fully the evolving approach of the RN to the way ahead with regard to autonomous systems. The discussion obviously built upon the presentation of Vice Admiral Noonan, Chief of the Royal Australian Navy. As mentioned earlier, Noonon provided his perspective on the way ahead for maritime autonomous systems in the build out and evolution of the Royal Australian Navy. At the heart of his presentation was an opportunity to discuss the Navy’s new Remote Autonomous Systems-AI 2040 strategy. As he put it: “Our Navy has already begun a journey to shape the maritime environment.
“To deter actions against our national interests. To respond with credible Naval power. To use robotics, autonomy, and artificial intelligence. Employing ever more reliable, robust, and repeatable systems. We will continue to drive our edge to help keep our people safe. To create mass, tempo and reach at sea and in all the lanes to enhance the joint force and strengthen our coalition with human command and trusted machine control. Our technologies, enabling our people to thrive. Our people, using technologies, to make smarter systems and better decisions.”
The RAS-AI strategy is focused on enhancing the fleet, not supplanting it. And he underscored that the Royal Australian Navy is working currently to introduce these technologies into the fleet.
I have argued elsewhere that that shift in manned platforms to relying on software upgradeability as a key driver for ongoing modernization clearly becomes a central piece in understanding how to build out RAS-AI capabilities for the maritime autonomous systems platforms or assets.
The Vice Admiral introduced a very useful term which covers the way ahead for thinking about integratability across the crewed and uncrewed assets in the force. As he put it: “Evergreen, I think is the new term for spiral development. That’s the way I look at it. It’s about ensuring that we have systems that remain contemporary, and I am challenged on a daily basis about capability gaps and about deficiencies in the long lead times that require us in the shipbuilding space.
“It takes about 10 years to build a submarine, or five years to build a frigate. And are we incorporating old technologies? Bottom answer is no, in that we are designing future and evergreen in growth into our platforms. And I think that’s a very important concept that we have not always fully grasped.”
I had a chance to further discuss how to think about the way ahead for maritime autonomous systems within the fleet with Vice Admiral (Retired) Tim Barrett. I have been in an ongoing discussion about maritime matters with Barrett ever since I first met him in 2015, and as a key architect for shaping the build out of the 21st century Royal Australian Navy. I wanted to focus on the interaction between the new build strategy for the Navy’s surface and subsurface platforms and the introduction of autonomous systems into the fleet.
Vice Admiral (Retired) Barrett is currently on the board of a key player in shaping a way ahead for autonomous systems, both in the civil and military sector. The CEO of that organization, Trusted Autonomous Systems Defence Cooperative Research Centre, spoke at the seminar and provided a broad perspective on autonomous systems.
This is how Jason Scholz, CEO of TAS, highlighted the purposes of the organization as follows: “Advance trusted autonomous systems technologies for asymmetric advantage so the ADF can fight and win; Create & foster game-changing research, of world standing, that pushes theoretical & practical boundaries of future trusted autonomous systems; Deliver autonomous systems & robotics technology with clear translation into deployable defence programs & capabilities for Australian Defence; and Build an environment in which Australian industry has the capacity & skills to deliver complex autonomous systems both to Australian Defence & as integral members of the global defence supply chain.”
This means that Barrett brings to the discussion a deep understanding of the challenges of building out the RAN’s surface and subsurface fleet with the coming of new autonomous technologies.
The challenge of course is to shape an approach which allows for their integration and dynamic processes of change over time. The core point which Barrett drove home in our conversation was the key challenge of building out the integrated distributed force with an open aperture to inclusion of the force enhancement capabilities which maturing autonomous systems can provide.
He argued that at TAS the focus was not just on the next big thing as how what developers can bring to the party which can enhance the capabilities of the force. As he put it: “the new technologies need to be fitted into a broader operational environment. The force has to fight tonight; how can we shape ways ahead which lead to force enhancement?”
In focusing on the subsurface domain, he argued that the context for submarines was changing significantly. They are increasingly operating in a broader kill web environment and need to be able to tap into trusted data to aid their operations and focus their efforts. Clearly, autonomous systems can play an increasingly role in mapping and tracking the undersea domain, and the manned assets become much more capable as trusted data networks can be tapped into.
As he noted: “Submarines are part of the undersea domain battle. They are key contributors, but they have to work within an integrated and distributed mode, which provides them with the information and context in which they can best operate and enhance the operational outcome.”
Evolving autonomous systems will be able to provide enhanced undersea domain awareness which will then enhance the capability of the force to execute their operational plans more effectively.
But this leads as well to reinforcing the broader challenge facing the force: How do you manage and distribute the data being generated to provide information for tactical decision making at the edge and for broader tactical theater wide decision making?
And this leads Barrett to his version of Occom’s razor when assessing what a particular autonomous system might contribute to the force: “I’m less interested in what the particular device being proposed – whether it is a swarming device, an undersea array or a sea glider — but I’m more interested in how your device obtains data, and how reliable it is and how to distribute it and how relevant it is or is not to the commander fighting the battle in operational space in which he is operating.”
Notably, how do autonomous systems close gaps in the information-decision dynamic within which forces can operate as an effective kill web? Answering this question is not a one-off platform decision; it is an evolving modernization effort in which the challenge identified by Vice Admiral Noonan needs to be met of working an evergreen force.
Autonomous Warrior 2022 is a next step in dealing with such a question and doing so from the practical approach to learn by doing which is a hallmark certainly of the ADF approach to force building.
CDRE Darron Kavanagh’s Perspective
And that leads me to the final presentation which I would like to highlight for this article. At the most recent Williams Foundation seminar, the focus was precisely on shaping a way ahead for force building. And a Naval officer who figured prominently in Autonomous Warrior 2022, CDRE Darron Kavanagh, Director General Warfare Innovation, RN, spoke at that conference.
CDRE Kavanagh provided a Royal Australian Navy perspective on the way ahead with regard to the integration of the maritime domain within an integrated warfighting force. Cavanagh’s presentation certainly recalled a core point made by Vice Admiral Barrett at 2016 Williams Foundation seminar when he underscored the following: “we are not building an interoperable Navy; we are building an integrated force for the Australian Defence Force.”
Kavanagh highlighted the importance of the evolving role of the maritime force in the offensive-defensive enterprise which a kill web force embodies. “The proliferation of advanced technology and the associated rapid advances in offensive systems such as high-speed and sophisticated anti-ship missiles means that we, more than ever before, need to critically analyze and prioritize our capability development plans to ensure the necessary force protection measures are available while simultaneously developing offensive systems and war-fighting procedures that will contribute to our mission’s success.”
The challenge of getting operational decisions done rapidly and correctly at the point of interest is increasingly crucial, which is why decision making at the tactical edge enabled by new ISR and C2 capabilities is increasingly important for an evolving maritime force.
This is how CDRE Kavanagh framed the challenge: “The speed at which decisions must now be made and are being made by our adversaries and the need to incorporate data from a multitude of sources is key. Intelligence must be analyzed and interpreted quickly to serve the war fighter. The concepts of what are the weapons in our critical capabilities is changing.
“From the traditional platform centric views towards innovation and artificial intelligence, robotics, and sophisticated senses amongst many others, so that we can achieve cognitive superiority and decision-making advantage over an enemy by being networked and integrated across our three defense services. Our ammunition is actually information and our success will be dependent on how accurate and relevant it is and our skill in using it. Our transition to developing this capability is critical.
“Now, the Navy sees itself as providing, not just traditional sea power with our ships and aircraft and submarines, whether they’re crude or uncrude, but through intelligent and integrated networking across defense. We are an integral part of a potential response that presents any adversary with an unacceptable level of risk to deter aggression against Australia and our national interests.”
And by building out the networked distributed but integratable force, Navy is in a good position to leverage maritime autonomous systems. Put another way, by building the proper foundation it is possible to add new ISR capabilities, for example, which lead to enhanced decision making rather than information overload.
This is how Kavanagh framed the opportunity being opened up by maritime autonomous systems: “In the maritime context, it’s clear that our journey towards a networked integrated force is essential to enable Navy to leverage the full capabilities that autonomous uncrewed and optionally crewed systems can give us. There are real opportunities to leverage those systems, to deliver effects in a more asymmetric manner, using their attributes of low-cost mass. I.e., the use of the smart, the small, the many, the cheap to complement our traditional complex large, few, expensive, crude platforms.”
Kavanagh concluded: “More than ever, success in warfare is likely to depend on our capability to think creatively, to manage our information as a weapon of warfare. Tactically, we must use our technology and expertise to disrupt and degrade our adversaries’ decision-making. And we must ensure that our decision-making is sound and timely, base it on the best available inputs and trust it.”
Next Generation Autonomous Systems: A Williams Foundation Special Report
And for a further examination of the way ahead for autonomous systems, see chapter four in my recently published edited book Defense XXI;
https://www.barnesandnoble.com/w/defense-xxi-robbin-f-laird/1141388804
https://www.kobo.com/us/en/ebook/defense-xxi